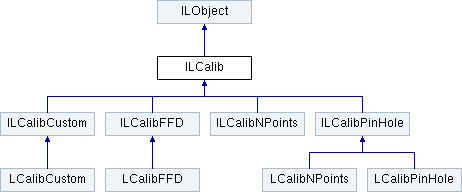
该接口类为标定对象的基类,提供基本标定功能对应的接口。
更多...
|
| LPVErrorCode | AddPoint (double imagePointX, double imagePointY, double worldPointX, double worldPointY) |
| |
| LPVErrorCode | AddPoints (ILCalibPointPairs *pointPairs) |
| |
| LPVErrorCode | Calibrate () |
| |
| LPVErrorCode | FixImage (ILImage *image, ILImage *fixedImage) |
| |
| LPVErrorCode | GenPostTransformMatrix (ILCalibPointPairs *pointPairs) |
| |
| void | ImageToWorld (double imagePointX, double imagePointY, double *worldPointX, double *worldPointY) |
| |
| BOOL | IsCalibrated () |
| |
| void | SetImageSize (int w, int h) |
| |
| void | SetPostTransform (double offsetX, double offsetY, double deltaAngle) |
| |
| void | SetPostTransformMatrix (ILTransform *tf) |
| |
| void | SetPostTransformMatrix23 (LMatrix23 *data) |
| |
| void | SetPostTransformMatrix33 (LMatrix33 *data) |
| |
| void | WorldToImage (double worldPointX, double worldPointY, double *imagePointX, double *imagePointY) |
| |
| ILObject * | Copy () |
| |
| LPVErrorCode | Load (LString filename) |
| |
| void | Reset () |
| |
| LPVErrorCode | Save (LString filename) |
| |
| BOOL | Valid () |
| |
该接口类为标定对象的基类,提供基本标定功能对应的接口。
这是所有标定对象的基类,对于不同的标定模型,需选择不同的标定对象。 使用这个接口,需要创建一个标定对象,如:
ILCalibNPoints, ILCalibPinHole, ILCalibFFD, ILCalibCustom...
◆ AddPoint()
| LPVErrorCode AddPoint |
( |
double |
imagePointX, |
|
|
double |
imagePointY, |
|
|
double |
worldPointX, |
|
|
double |
worldPointY |
|
) |
| |
增加一个用于标定的点对。
- 参数
-
| [in] | imagePointX | 图像点的 x 坐标 |
| [in] | imagePointY | 图像点的 y 坐标 |
| [in] | worldPointX | 物理点的 x 坐标 |
| [in] | worldPointY | 物理点的 y 坐标 |
- 返回值
-
◆ AddPoints()
◆ Calibrate()
◆ FixImage()
◆ GenPostTransformMatrix()
生成和设置后变换矩阵,基于修正后图像上的图像坐标点及其对应的期望物理坐标。
- 参数
-
- 返回值
-
◆ ImageToWorld()
| void ImageToWorld |
( |
double |
imagePointX, |
|
|
double |
imagePointY, |
|
|
double * |
worldPointX, |
|
|
double * |
worldPointY |
|
) |
| |
映射点坐标从图像坐标系到物理坐标系。
标定对象需成功标定,若未标定则返回的坐标数值与输入相同。
- 参数
-
| [in] | imagePointX | 图像坐标系下的 x 坐标 |
| [in] | imagePointY | 图像坐标系下的 y 坐标 |
| [out] | worldPointX | 返回物理坐标系下的 x 坐标 |
| [out] | worldPointY | 返回物理坐标系下的 y 坐标 |
◆ IsCalibrated()
检查是否标定成功
- 返回值
-
| val | 若标定成功,返回 True,否则,返回 False |
◆ SetImageSize()
| void SetImageSize |
( |
int |
w, |
|
|
int |
h |
|
) |
| |
设置相机采集到的图像的尺寸,用于不依赖图像的标定过程,如 9 点标定。
- 参数
-
◆ SetPostTransform()
| void SetPostTransform |
( |
double |
offsetX, |
|
|
double |
offsetY, |
|
|
double |
deltaAngle |
|
) |
| |
◆ SetPostTransformMatrix()
◆ SetPostTransformMatrix23()
| void SetPostTransformMatrix23 |
( |
LMatrix23 * |
data | ) |
|
◆ SetPostTransformMatrix33()
| void SetPostTransformMatrix33 |
( |
LMatrix33 * |
data | ) |
|
◆ WorldToImage()
| void WorldToImage |
( |
double |
worldPointX, |
|
|
double |
worldPointY, |
|
|
double * |
imagePointX, |
|
|
double * |
imagePointY |
|
) |
| |
映射点坐标从物理坐标系到图像坐标系。
标定对象需成功标定,若未标定则返回的坐标数值与输入相同。
- 参数
-
| [in] | worldPointX | 物理坐标系下的 x 坐标 |
| [in] | worldPointY | 物理坐标系下的 y 坐标 |
| [out] | imagePointX | 返回图像坐标系下的 x 坐标 |
| [out] | imagePointY | 返回图像坐标系下的 y 坐标 |
◆ FixImageMode
 Public 成员函数 继承自 ILObject
Public 成员函数 继承自 ILObject