|
| void | GetPatCenter (double *patX, double *patY, double *patAngle) |
| |
| LPVPatCenterMode | GetPatCenterMode () |
| |
| ILPoints * | GetPatFeature (int level) |
| |
| void | GetPatImage (ILImage *img) |
| |
| void | GetPatMask (ILImage *mask) |
| |
| void | GetPatPruneMask (ILImage *mask) |
| |
| LArray< ILPolygon * > | GetPatShape (int level) |
| |
| BOOL | IsLearnt () |
| |
| LPVErrorCode | Learn (ILImage *img, ILRegion *region) |
| |
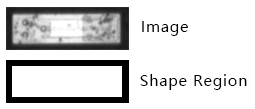
| LPVErrorCode | LearnWithShape (ILImage *img, ILRegion *region, ILRegion *shapeRegion) |
| |
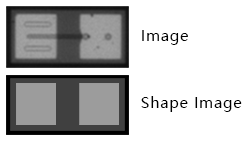
| LPVErrorCode | LearnWithShapeImage (ILImage *img, ILRegion *region, ILImage *shapeImg) |
| |
| LPVErrorCode | Match (ILImage *img, ILRegion *region, ILMatchResults **results) |
| |
| LPVErrorCode | Prune (ILImage *img, ILRegion *region, LArray< int > shapeIdx0, LArray< int > shapeIdx1) |
| |
| void | SetPatCenter (LPVPatCenterMode centerMode, double patX, double patY, double patAngle) |
| |
| ILObject * | Copy () |
| |
| LPVErrorCode | Load (LString filename) |
| |
| void | Reset () |
| |
| LPVErrorCode | Save (LString filename) |
| |
| BOOL | Valid () |
| |
|
|
int | AcceptScore [get, set] |
| | 用于筛选匹配结果的最小匹配分数,取值在 1 ~ 100 的范围。分数越高表示匹配标准越严格。
匹配搜索过程并不会遍历所有候选位置,而是先基于候选位置与模板的近似相似度进行排序,然后依次优化其最终的匹配位置、角度和缩放比例等到亚像素精度。 当找到足够多的满足匹配分数的结果时,将停止搜索。
|
| |
|
int | AccuracyLevel [get, set] |
| | 精度等级,高精度等级通常意味着更精确和更稳定的匹配结果,但可能同时会降低匹配速度。
取值可为:0(低精度),1(中等精度,默认值)或者 2(高精度)
|
| |
|
int | AngleBias [get, set] |
| | 角度偏移,取值在 -180 ~ 180 之间。默认设置为 0。
|
| |
|
int | AngleTolerance [get, set] |
| | 角度范围,取值在 0 ~ 180 之间。默认设置为 5。
匹配的角度搜索区间基于角度的偏移及范围生成为 \( AngleBias \pm AngleTolerance \)
|
| |
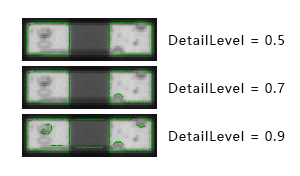
| double | DetailLevel [get, set] |
| | 模板细节程度,取值范围为 0 ~ 1,默认设置为 0.5。
数值越高,保留的细节越多,同时也可能引入更多的噪声,并影响算法的整体性能。 设置或修改模板细节程度后,需重新调用 Learn() 训练模板,特征点将在新的训练过程中按照细节程度重新提取。 更多...
|
| |
|
BOOL | ExcludeBoundary [get, set] |
| | 是否剔除图像或区域边界上的匹配结果
|
| |
| int | GrayValueWeight [get, set] |
| | 融合匹配权重(百分数),用于合并基于形状相似性的匹配分数和基于灰度特征(NCC)的匹配分数。
默认设置为 0, 即灰度分数不参与匹配评价。最终匹配分数按照该公式计算: \( Score = Score_{shape} \times (1 - w) + Score_{gray} \times w \) . 更多...
|
| |
|
BOOL | IgnoreMissing [get, set] |
| | 缺失部分是否负面影响最终匹配结果。默认设置为 true,即计分时忽略缺失部分、且不启用缺失比例检查。
|
| |
|
BOOL | IgnorePolarity [get, set] |
| | 是否在匹配过程中忽略边缘极性。默认关闭这个配置。
|
| |
|
BOOL | IsotropicScale [get, set] |
| | 是否保持缩放长宽比,默认设置为 true
|
| |
| LPVPatMatchMethod | MatchMethod [get, set] |
| | 匹配方法,默认设置为 LPVPatMatchAuto 更多...
|
| |
|
int | MaxCount [get, set] |
| | 期望的最大匹配数量
|
| |
| int | MaxDeformation [get, set] |
| | 相对于训练特征的最大局部形变,像素单位。
通常有助于找到与模板相比略微变形的物体,但也增加了找到错误匹配的风险,因为强烈变形会失去其特征形状。 更多...
|
| |
|
int | MissingTolerance [get, set] |
| | 匹配结果的最大缺失比例(百分比)。 取值范围在 0 ~ 100 之间,为百分数。默认设置为 50,表示最多可以接受 50% 的缺失比例。
注意缺失比例检查是否启用由 IgnoreMissing 属性控制。当 IgnoreMissing 为 False 时,启用缺失比例检查。
|
| |
| int | NoiseThreshold [get, set] |
| | 匹配时使用的对比度阈值,用于避免噪声像素参与匹配。取值范围为 0 ~ 100. 更多...
|
| |
|
int | Overlap [get, set] |
| | 匹配结果之间的最大重叠比例(百分比)。匹配结果中的缺失特征也计入重叠比例,视为与背景的重叠。 取值范围在 1 ~ 80 之间,为百分数。默认设置为 50,表示 50% 的重叠比例。推荐的取值在 30 ~ 70 附近。
|
| |
|
int | ScaleBias [get, set] |
| | 尺寸缩放偏移,取值在 50 ~ 150 百分数。默认设置为 100。
|
| |
|
int | ScaleTolerance [get, set] |
| | 尺寸缩放范围,取值在 0 ~ 50 百分数。默认设置为 0。
匹配的尺寸缩放搜索区间基于缩放的偏移和缩放范围生成为 \( ScaleBias \pm ScaleTolerance \) .
|
| |
|
BOOL | StrictScore [get, set] |
| | 是否在匹配过程中启用严格评分。默认关闭这个配置。
若启用严格评分,匹配结果的分数将基于原始图像和所有特征细节计算。否则,分数可能在缩小并平滑后的图像上计算,该过程更快速但相比前者考虑更少细节。
|
| |
|
BOOL | UseCache [get, set] |
| | 是否在匹配过程中使用缓存数据。 开启缓存将稍微加快匹配过程,但占用更多的内存。默认开启这个配置。
|
| |
| LString | Name [get, set] |
| | 对象的名称,默认为空。
大多数情况下,LPV 算法类并不使用这个名称。
若 ILDrawable::SetDrawName() 启用,该名称将被绘制在对象的附近 更多...
|
| |
该接口提供模板匹配的功能。
模板匹配用于在指定图像和区域中基于训练的模板,搜索和定位一个或多个匹配结果。
该算法具有高实时性和高亚像素角度的特点。匹配过程基于从模板图像中训练得到的形状特征,结合图像的灰度特征。 可以定位目标物体的旋转、平移和缩放,可有效应对产线环境的光照变化、物体材质变化引起的明暗、对比度、模糊等现象。
使用这个接口,需要创建一个 LMatch 对象。
示例代码
C++
ILMatchPtr matchTool = LMatch::Create();
matchTool->Learn(m_template_img, nullptr);
if (err != LPVErrorCode::LPVNoError) return;
LPVErrorCode
LPV 算法或函数运行过程中遇到的错误。
Definition: LPVCore.idl:545
C#
LMatch matchTool = new LMatch();
matchTool.Learn(m_template_img, null);
COM
ILMatchPtr matchTool = LMatch::Create();
matchTool->Learn(m_template_img, NULL);
if (err != LPVErrorCode::LPVNoError) return;
 Public 成员函数 继承自 ILObject
Public 成员函数 继承自 ILObject
 返回图像
返回图像